Aerotenna基于雷達(dá)技術(shù)的避障方案獲得UTM 2016無人機(jī)避障比賽冠軍
2016-11-10
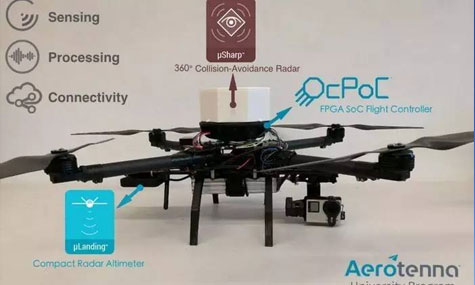
在2016年11月8日-11月10日于美國紐約州雪城舉辦的無人機(jī)交通管制峰會(huì)(Unmanned Traffic Management Convention - UTM 2016)中,Aerotenna利用其基于雷達(dá)原理的避障傳感系統(tǒng)和SoC FPGA飛控系統(tǒng)的先進(jìn)技術(shù)組合���,獲得了此次峰會(huì)現(xiàn)場舉行的無人機(jī)避障飛行比賽冠軍�。






 網(wǎng)安備11010802024201號(hào)
網(wǎng)安備11010802024201號(hào)
